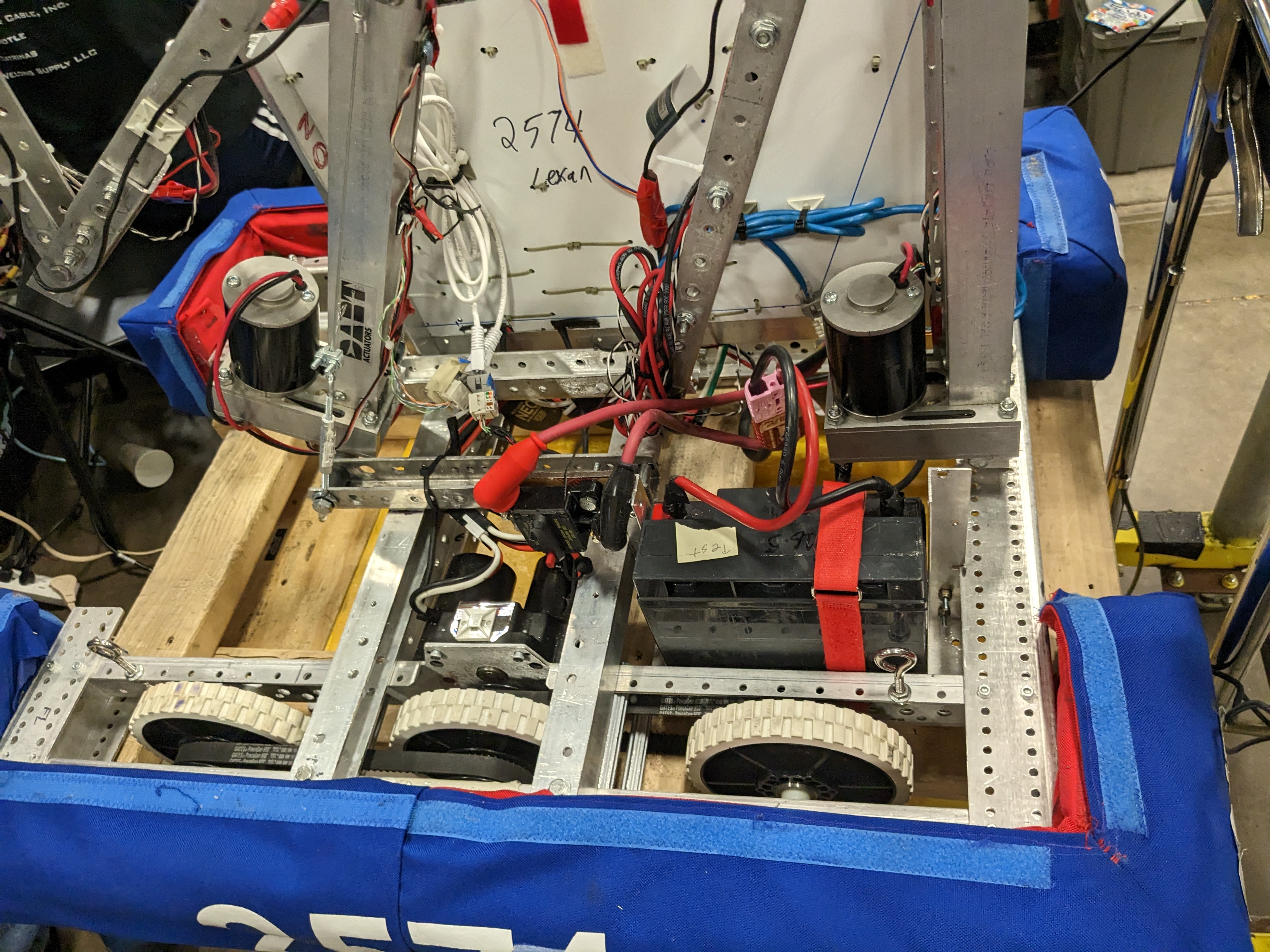
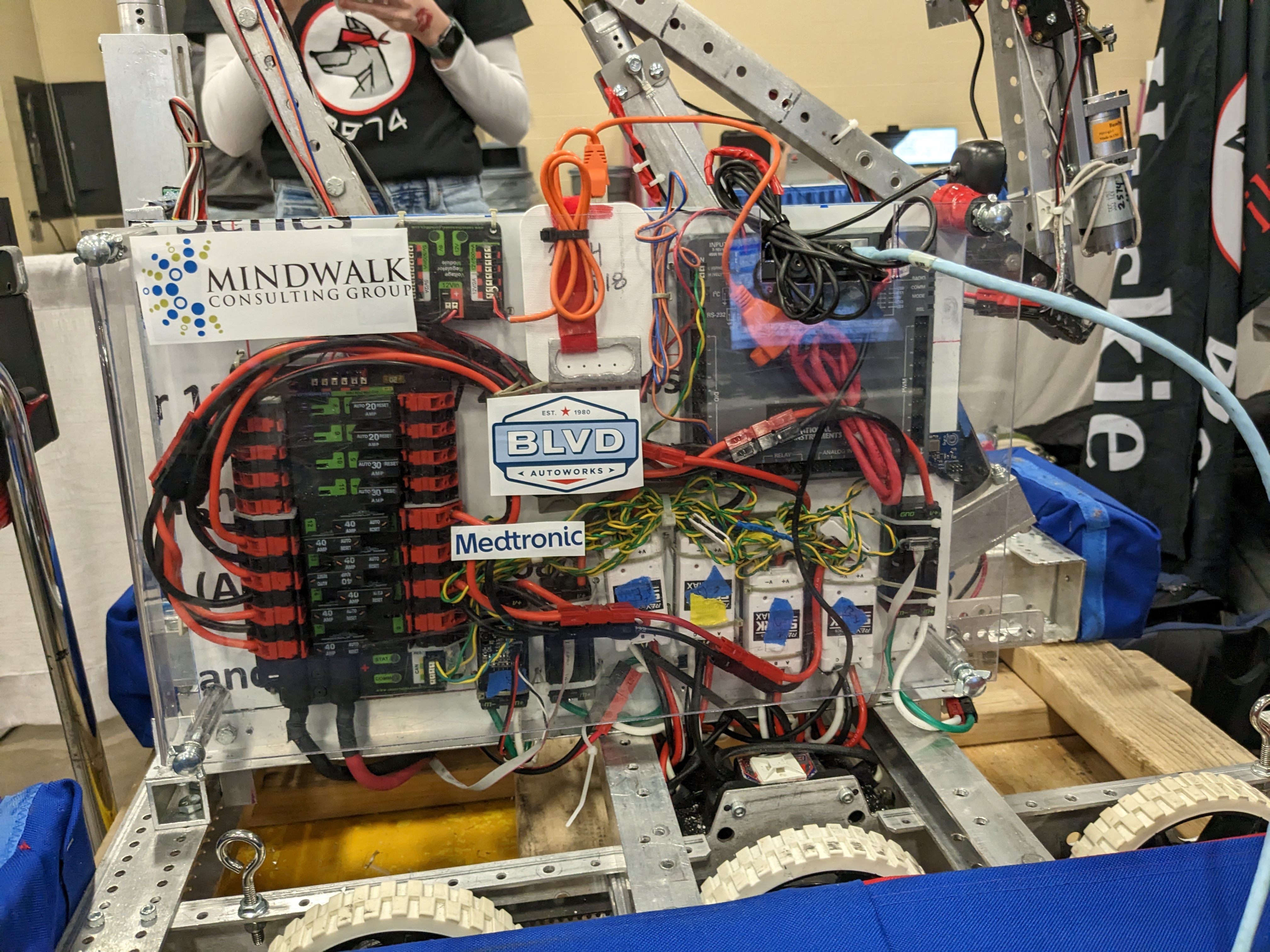
This year, we choose tank drive for our drivetrain. We have 2 sets of 3 wheels, ran by 2 brushless motors per side through a gearbox.
To move the cones and cubes, we have a arm moved by 2 linear actuators. On the there is a gripper mechanism. We use a lead screw to omen and close it, and it has gripper pads to help hold cones and cubes.
Our robot weighs only 58 lbs (68 with the bumpers).
{kind=link}